Yaw is a fundamental concept in rotational dynamics, describing a rigid body’s angular movement around its vertical axis. In engineering, aviation, maritime navigation, and automotive design, understanding yaw is essential for maintaining directional control and stability. This concept, while seemingly simple, intertwines with complex physical behaviors and system responses in various motion platforms.
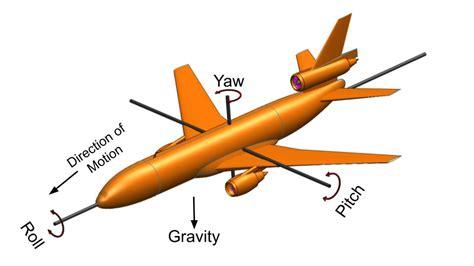
Yaw rotation refers to the change in the heading direction of a body—most notably, an aircraft, ship, or vehicle—left or right about its vertical axis. This axis is perpendicular to the horizontal plane and passes through the center of gravity. Unlike pitch and roll, which describe up-and-down or tilting movements, yaw directly impacts how a vehicle or vessel maintains or changes its course.
The Mechanics Behind Yaw Motion
Yaw movement is quantified by yaw rate (also known as yaw velocity), which measures how fast the heading angle of a moving object changes over time. Typically expressed in degrees per second or radians per second, this rate plays a pivotal role in navigation systems, stability algorithms, and dynamic modeling.
In practical terms, if a car is making a turn at a constant radius, the yaw rate can be related to the lateral acceleration using the formula:
lateral acceleration = tangential speed × yaw velocity = (tangential speed²) / radius of turn
This relationship helps engineers model vehicle stability and control systems accurately. When this equation no longer applies—due to speed or radius variation—it signifies complex or unstable maneuvers, which require more advanced analysis.
Measuring Yaw: Sensors and Systems
Modern vehicles and aircraft rely heavily on electronic systems to measure and manage yaw. The most common technologies include:
- Gyroscopes: Provide direct angular velocity measurements.
- Accelerometers: Especially when aligned vertically, they help deduce yaw velocity through motion synthesis.
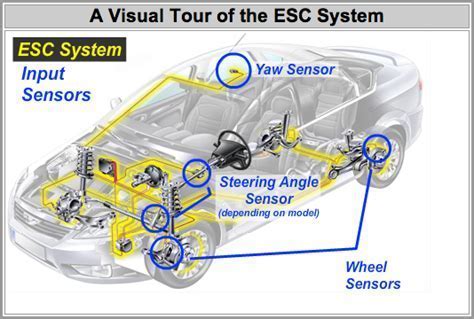
- Yaw Rate Sensors: Specialized instruments embedded in automotive stability systems like ESC (Electronic Stability Control).
These systems contribute to critical real-time adjustments. For instance, in cars, yaw rate sensors are instrumental in electronic stability programs (ESP), which adjust braking force and engine output to maintain safe trajectories during skids or sudden maneuvers.
Yaw in Aircraft Dynamics
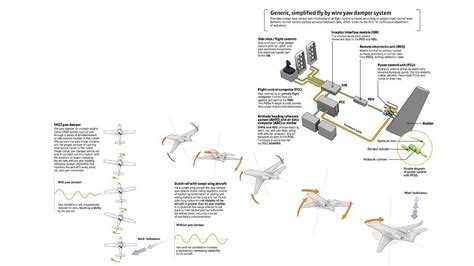
In aviation, yaw complements pitch and roll to define an aircraft’s three degrees of rotational freedom. Controlled via the rudder, yaw movement enables the aircraft to pivot left or right along its vertical axis. This is essential during coordinated turns, crosswind landings, and while correcting for adverse yaw—a condition where the aircraft yaws opposite the intended direction due to differential drag on the wings.
The aircraft’s yaw is monitored and corrected using instruments such as:
- The turn coordinator
- The slip/skid indicator
- Integrated inertial navigation systems (INS) that track all axis rotations
These tools enable pilots to maintain controlled flight paths, especially when external forces like wind affect the aircraft’s heading.
Road Vehicle Dynamics and Yaw Stability
In automotive engineering, yaw forms a core part of vehicle dynamics modeling. Consider a four-wheel vehicle: the front axle lies a meters ahead of the center of gravity, and the rear axle is b meters behind it. The vehicle’s body may point at angle θ (theta), while it actually moves at angle ψ (psi)—often differing due to side slip and tire deformation.
To model the vehicle’s rotational behavior, the angular velocity ω (omega) and slip angle β (theta – psi) are used in motion equations:
dω/dt = [2k(a − b)/I]β − [2k(a² + b²)/VI]ω
dβ/dt = −(4k/MV)β + [(1−2k)(b−a)/MV²]ω
Where:
- k is the cornering stiffness coefficient
- I is the moment of inertia
- M is mass
- V is vehicle speed
The behavior of these equations determines whether a vehicle remains directionally stable. If both stiffness and damping coefficients are positive, the system returns to equilibrium. However, if the center of gravity lies too far back (b > a) and the speed exceeds a certain threshold, yaw instability arises.
This principle is central to the design of safety systems, suspension setups, and steering geometry in modern vehicles. When optimized, such systems prevent loss of control in high-speed or sharp-turning scenarios.
Historical Significance in Aviation Design
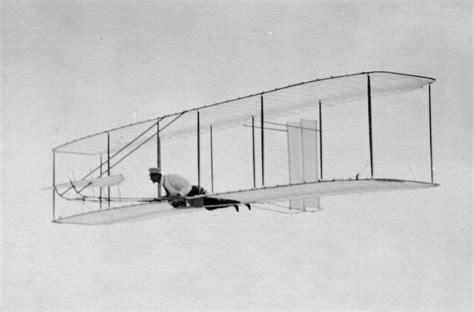
The significance of yaw control can be traced to the early days of powered flight. The Wright brothers’ 1902 glider was the first to demonstrate active control across all three axes—pitch, roll, and yaw. Their implementation of a moveable rear rudder allowed the aircraft to maintain heading and counteract lateral disturbances, laying the foundation for modern flight control.
Relationship With Other Rotational Systems
Yaw is not an isolated concept. In physics and mathematics, it is part of a trio of intrinsic rotational axes—yaw (vertical), pitch (lateral), and roll (longitudinal). These are governed by principles akin to the Frenet–Serret formulas, which describe the behavior of a moving body along a curved path.
In matrix algebra, intrinsic rotations such as yaw are expressed by right-multiplying the frame matrix with a yaw rotation matrix. This facilitates computational simulations and inertial calculations in aerospace and robotics.
Yaw Rate Control and System Integration
The modern landscape of mobility systems integrates yaw rate control into larger feedback loops. In automated driving systems, drones, and maritime autopilot mechanisms, yaw feedback is synthesized alongside GPS data, visual sensors, and inertial measurement units (IMUs).
Advanced driver assistance systems (ADAS) rely on yaw estimates to anticipate vehicle paths. This prevents oversteer or understeer, supports lane-keeping assist, and improves cornering behavior in both human-driven and autonomous vehicles.
Similarly, naval vessels utilize gyrocompasses and heading sensors to maintain course stability, especially in turbulent waters. Yaw measurements become indispensable in target tracking, weapon system alignment, and autonomous marine navigation.
Conclusion: Yaw as a Pillar of Motion Control
Understanding yaw goes beyond academic theory. It is a cornerstone of motion control and stability in dynamic systems. From preventing aircraft rollovers during adverse weather to helping a self-driving car negotiate a curve, yaw—and its measurement, control, and analysis—ensures predictable, safe, and controlled movement.
Future innovations in mobility, from electric VTOL aircraft to AI-driven logistics platforms, will continue to rely on accurate yaw control. As engineering systems grow smarter and more autonomous, yaw remains a critical reference for orientation and navigation across all domains of motion.








