
A lunar lander, or Moon lander, represents a pinnacle of aerospace engineering—a sophisticated spacecraft meticulously designed with the singular, audacious goal of alighting safely on the desolate, cratered surface of the Moon. These remarkable machines are the vanguards of lunar exploration, serving as robotic emissaries or, in one historic instance, as chariots for human explorers. As of the current understanding in early 2025, the Apollo Lunar Module holds the unique distinction of being the only lunar lander to have successfully transported humans to and from the lunar surface, achieving this feat six times between 1969 and 1972 under the banner of the United States’ Apollo Program. Beyond these crewed missions, a diverse array of robotic landers has also made the journey, some performing in-situ analysis and others undertaking the even more complex task of returning precious lunar samples to Earth, offering scientists a tangible piece of another world.
The intricate design of a lunar lander is dictated by a confluence of demanding factors. The nature and mass of its payload, whether scientific instruments, rovers, or human occupants, heavily influence its architecture. The flight rate, propulsive requirements for deceleration and maneuvering, and various configuration constraints further shape its form and function. Critical design considerations also encompass the overall energy budget for the mission, the planned duration of operations on the lunar surface, and, for crewed missions, the indispensable life support systems needed to sustain astronauts in the harsh lunar environment. The Moon’s relatively high gravity—greater than that of any known asteroid, though significantly less than Earth’s or other Solar System planets—coupled with its almost complete lack of a discernible atmosphere, presents a unique set of challenges. This absence of atmospheric drag negates the possibility of using aerobraking or parachutes for deceleration, a technique commonly employed for landings on Mars or Venus. Consequently, a lunar lander must rely entirely on its propulsion systems, typically chemical rockets, to meticulously control its descent and achieve a gentle, soft landing.
The Dawn of Lunar Landings: Pioneering Efforts (1958-1976)
The initial chapters of lunar landing history were written amidst the intense geopolitical rivalry of the Cold War, with the Soviet Union and the United States vying for supremacy in space. The Soviet Union’s Luna program, an ambitious series of missions initiated in 1958, encompassed impactors, flybys, orbiters, and ultimately, landers. After a string of eleven challenging and unsuccessful attempts, the Luna 9 spacecraft etched its name in history on February 3, 1966, by becoming the first probe to achieve a soft landing on the Moon. This monumental success was followed by other Luna missions that further pushed the boundaries of robotic exploration. Notably, three Luna spacecraft successfully returned lunar soil samples to Earth between 1972 and 1976, providing invaluable scientific data. The program also deployed the Lunokhod robotic lunar rovers in 1970 and 1973, which trundled across the lunar landscape, conducting experiments and transmitting images. In total, the Luna program achieved seven successful soft landings out of 27 attempts, a testament to the formidable difficulty of these early endeavors.

Not far behind, the United States launched its Surveyor program, designed to scout landing sites and test technologies for the upcoming Apollo missions. Surveyor 1 successfully soft-landed on June 2, 1966, just months after Luna 9. This initial triumph was followed by four more successful landings, culminating with Surveyor 7 on January 10, 1968. The Surveyor program demonstrated a higher success rate, with five soft landings out of seven attempts. These robotic precursors were crucial, providing close-up images of the lunar surface, analyzing soil mechanics, and confirming that the Moon’s regolith could support the weight of a heavier lander. One mission, Surveyor 6, even performed a brief “hop,” firing its engines to lift off the surface and land a few meters away, demonstrating the feasibility of a lunar ascent.
The Giant Leap: The Apollo Lunar Module (1969-1972)
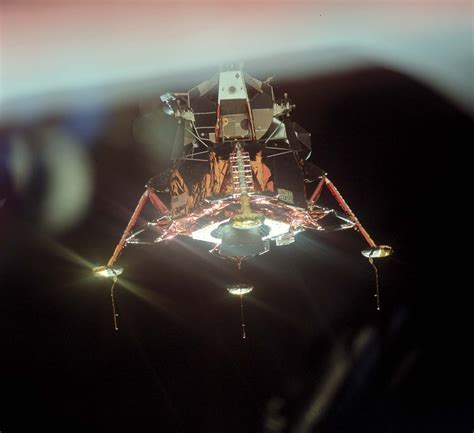
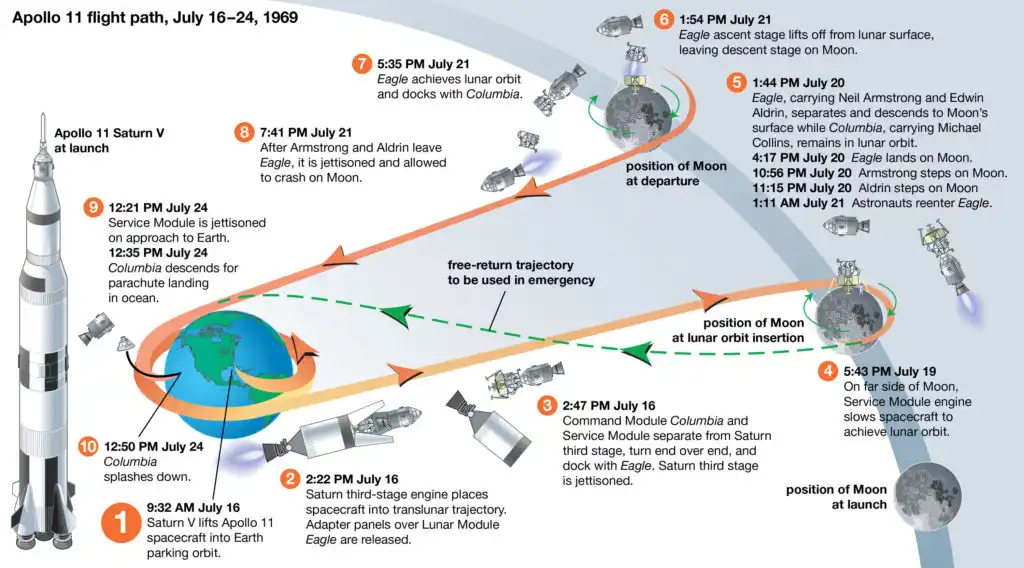
The undisputed icon of lunar landing technology remains the Apollo Lunar Module (LM), developed for the United States’ Apollo program. It stands alone as the only crewed lunar lander to have ever operated. Between July 1969 and December 1972, six Apollo missions successfully landed humans on the Moon, beginning with Apollo 11’s Lunar Module Eagle, piloted by Neil Armstrong and Buzz Aldrin. The LM was a marvel of lightweight engineering, designed exclusively for operation in the vacuum of space and on the low-gravity lunar surface. It consisted of two stages: a descent stage, which housed the landing gear, main descent engine, and supplies for the lunar stay, and an ascent stage, which contained the crew cabin, ascent engine, and life support systems. After the lunar surface exploration was complete, the descent stage served as a launchpad for the ascent stage, which would then rendezvous with the Command and Service Module (CSM) in lunar orbit for the journey back to Earth. The Apollo program executed six flawless lunar landings. A seventh attempt, Apollo 13, was dramatically aborted en route to the Moon due to an oxygen tank explosion in its Service Module, forcing the crew to use the LM as a “lifeboat” for their perilous return journey.
The Unflown Contender: The Soviet LK Lunar Module
While the Apollo program was forging ahead, the Soviet Union was concurrently developing its own crewed lunar landing capability. The LK (Lunniy Korabl) lunar module was the Soviet counterpart to the American LM. Designed for a single cosmonaut, it was a smaller and lighter spacecraft, reflecting a different mission architecture that involved a solo lunar descent while a second cosmonaut remained in lunar orbit aboard a Soyuz-derived spacecraft. Several LK modules were successfully tested in uncrewed flights in low Earth orbit during the late 1960s and early 1970s. However, the LK never made it to the Moon. Its fate was inextricably linked to the N1 rocket, the super-heavy launch vehicle required for the Soviet crewed lunar missions. The N1 suffered a series of catastrophic launch failures. Coupled with the success of the American Apollo 11 mission in July 1969, these setbacks led the Soviet Union to eventually cancel both the N1 rocket and the LK lunar module programs, closing the chapter on their crewed lunar ambitions for that era.
A New Era of Lunar Exploration: Robotic Landers (2013-Present)
After a hiatus of several decades, the Moon once again became a prime target for exploration, with new nations and private entities entering the fray. China, in particular, emerged as a major force with its highly successful Chinese Lunar Exploration Program (CLEP), also known as the Chang’e project. This ambitious program includes robotic landers, rovers, and sophisticated sample-return missions. Chang’e 3 achieved a flawless soft landing on December 14, 2013, deploying the Yutu rover. This was followed by the groundbreaking Chang’e 4 mission, which, in January 2019, accomplished humanity’s first-ever soft landing on the far side of the Moon, an area perpetually hidden from Earth. Then, in December 2020, Chang’e 5 successfully landed, collected lunar samples, and returned them to Earth, marking China as the third nation to achieve this feat. As of early 2025, the Chang’e program boasts an impeccable record of four successful soft landings from four attempts, showcasing remarkable proficiency in lunar surface operations.
This new lunar renaissance has also seen efforts from other nations and private organizations, albeit with mixed results, underscoring the persistent challenges of lunar landings. Israel’s SpaceIL, a private organization, attempted a robotic lunar landing with its Beresheet lander on April 11, 2019. Despite reaching lunar orbit, the lander unfortunately crashed during its final descent. SpaceIL has since announced plans for a follow-up mission, Beresheet 2. India’s Indian Space Research Organisation (ISRO) faced a similar setback with its Chandrayaan-2 mission on September 6, 2019, when its Vikram lander crashed. However, ISRO demonstrated remarkable resilience and learning. On August 23, 2023, the follow-up Chandrayaan-3 mission successfully soft-landed its Vikram lander near the lunar south pole, making India the fourth country to achieve a lunar soft landing. The lander later performed a brief “hop” on September 3, 2023, successfully testing technologies crucial for India’s planned lunar sample return mission, Chandrayaan-4.

Japan’s private company ispace (distinct from China’s i-Space) attempted a lunar soft landing with its Hakuto-R Mission 1 robotic lander on April 25, 2023. This attempt also ended in failure, with the lander crashing onto the lunar surface. Undeterred, ispace is proceeding with plans for subsequent missions. Russia, seeking to revive its lunar exploration legacy, launched the Luna 25 lander on August 10, 2023, as part of its Luna-Glob program, the successor to the Soviet Luna program. Intended for a landing near the lunar south pole, Luna 25 unfortunately crashed on August 19, 2023. In contrast, Japan’s national space agency, JAXA, achieved a significant milestone with its Smart Lander for Investigating Moon (SLIM). On January 19, 2024, SLIM made a remarkably precise landing, within 100 meters of its target spot, though it landed with an off-nominal attitude (upside down) after losing one of its two engine nozzles during descent, which also impacted its solar power generation and communication bandwidth. Despite these issues, SLIM successfully deployed two small rovers (LEV-1 and LEV-2) just before touchdown, and its landing made Japan the fifth country to soft-land a spacecraft on the Moon.
The Rise of Commercial Lunar Landings and Continued National Ambitions (2024 and Beyond)
The year 2024 marked a significant turning point with the operational commencement of NASA’s Commercial Lunar Payload Services (CLPS) program, designed to foster commercial partnerships for delivering science and technology payloads to the Moon. The first CLPS mission, Astrobotic Technology’s Peregrine Mission One, launched in January 2024, unfortunately suffered a critical propellant leak hours after launch. This malfunction prevented it from maintaining attitude control and charging its batteries, ultimately precluding any lunar orbit insertion or landing attempt. The probe subsequently burned up in Earth’s atmosphere. However, the second CLPS mission, Intuitive Machines’ Odysseus (IM-1) lander, achieved a historic success on February 22, 2024. It marked the United States’ first unmanned lunar soft landing in over 50 years and the first-ever successful landing by a private company in partnership with NASA. Odysseus also pioneered the use of cryogenic propellants (liquid oxygen and liquid methane) for a lunar lander. The mission was not without its anomalies: the lander tipped over onto its side upon touchdown due to a broken landing leg after landing on a slope of 18 degrees, an off-nominal initial lunar orbit was experienced, and its primary landing LIDAR instrument was non-functional, requiring engineers to use an experimental NASA LIDAR payload for navigation data. Communication bandwidth was also reported to be lower than expected. The EagleCam, a student-built camera system designed to be ejected prior to landing to capture images of the touchdown, was not deployed as planned but was later ejected on February 28, returning some data but not the crucial landing images.

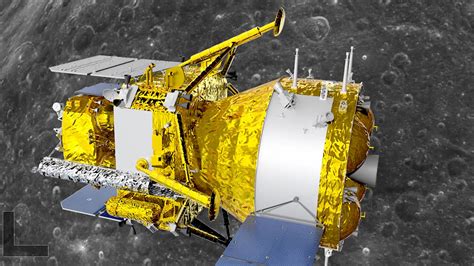
China continued its impressive lunar campaign with the Chang’e 6 mission, launched on May 3, 2024. This ambitious mission aimed to conduct the first-ever lunar sample return from the South Pole-Aitken Basin on the far side of the Moon. The Chang’e 6 lander successfully touched down at 22:23 UTC on June 1, 2024. After its robotic drill and arm completed sample collection and placement into an ascender vehicle, the ascender successfully launched from atop the lander at 23:38 UTC on June 3, 2024. It then docked with the Chang’e 6 orbiter in lunar orbit on June 6, transferring the sample container to the Earth reentry module. The orbiter departed lunar orbit on June 20, and the returner capsule landed in Inner Mongolia on June 25, 2024, successfully completing this historic far-side sample return mission and bringing back approximately 1.731 kg of unique lunar material.
The early months of 2025 saw further activity under the CLPS initiative. Firefly Aerospace’s Blue Ghost Mission 1 lander, carrying NASA-sponsored experiments and commercial payloads, was launched on January 15, 2025, alongside ispace’s Hakuto-R Mission 2. Blue Ghost successfully landed in Mare Crisium on March 2, 2025, marking another key success for the CLPS program. Concurrently, ispace’s Hakuto-R Mission 2, carrying the RESILIENCE lunar lander and TENACIOUS micro rover, also launched on January 15, 2025, and is targeting a landing in Mare Frigoris around May-June 2025. Intuitive Machines’ second CLPS mission, IM-2, launched on February 27, 2025, carrying NASA experiments and commercial rovers to the Mons Mouton region near the lunar south pole. IM-2 successfully landed on March 6, 2025. However, similar to its predecessor IM-1, the spacecraft came to rest on its side, complicating its planned science and technology demonstration objectives. It was later revealed that the lander’s altimeter (Athena) had failed during descent, leading to an inaccurate altitude reading. As a result, IM-2 struck a plateau, tipped over, and skidded across the lunar surface, rolling before settling inside a crater, kicking up regolith that coated its solar panels and degraded their performance.
The Unique Engineering Hurdles of Reaching the Moon’s Surface
Landing on any celestial body presents a formidable set of challenges, each unique to the target’s specific environment. The Moon, with its substantial gravity and virtual vacuum, demands highly specialized engineering solutions.
Navigating the Void: The Absence of Atmosphere
Unlike Mars, Venus, or Saturn’s moon Titan, which possess atmospheres thick enough for aerobraking and parachute deployment, the Moon offers no such atmospheric assistance. Space probes landing on these other bodies can shed significant velocity through friction with the atmosphere, drastically reducing the amount of propellant needed for the final landing. For instance, the 900 kg Curiosity rover was delivered to Mars by a descent stage system that utilized an aeroshell and parachute, with a total entry mass of 2400 kg, of which only about 390 kg was propellant for the powered descent phase. In stark contrast, the much lighter Surveyor 3 lander (292 kg dry mass) required nearly 700 kg of propellant for its 1967 lunar landing. This reliance solely on rocket propulsion for deceleration means lunar landers must carry a substantial fraction of their mass as fuel. However, the lack of atmosphere does offer a silver lining: lander designs do not need to incorporate heavy heat shields for atmospheric entry, and aerodynamic shaping becomes irrelevant, allowing for more functionally-driven, often ungainly, designs.
Wrestling with Lunar Gravity
While the Moon’s surface gravity is only about one-sixth that of Earth’s, it is considerably stronger than that of asteroids, comets, or many smaller moons in the Solar System. For missions to small bodies, “landing” often resembles a gentle docking maneuver, primarily involving rendezvous and matching very low relative velocities. On the Moon, however, the gravitational pull necessitates a significant and continuous braking thrust to slow the spacecraft from orbital speeds, which can exceed 1500 m/s (over 3350 mph), down to a gentle touchdown. This requires powerful and throttleable rocket engines and precise fuel management. The mass of the lander is a critical design constraint, as every kilogram landed on the Moon requires a corresponding amount of propellant, which itself has mass. This mass penalty is even more pronounced for missions that include an ascent from the lunar surface, as was the case for the Apollo Lunar Module and sample return missions like Luna and Chang’e.
Surviving the Extremes: The Lunar Thermal Environment
The Moon experiences extreme temperature variations due to its long solar day—a lunar day lasts approximately 29.5 Earth days, meaning any given point on the surface endures roughly two weeks of continuous, intense sunlight followed by two weeks of frigid darkness. During the lunar day, surface temperatures near the equator can soar to around 120°C (248°F), while during the long lunar night, they can plummet to as low as -250°C (-418°F) in some polar regions. These extreme temperature swings pose a severe challenge for thermal control systems. Most spacecraft instruments and electronics must be maintained within a much narrower operational range, typically between -40°C and 50°C (-40°F and 122°F). Human comfort, for crewed landers, requires an even tighter range of 20°C to 24°C (68°F to 75°F). Landers must therefore incorporate sophisticated systems to radiate excess heat during the lunar day and provide heating during the frigid lunar night. The extended darkness makes solar power an unreliable source for heating during the night, often necessitating the use of radioisotope heater units (RHUs), which use the decay of radioactive elements to generate heat, or advanced battery systems for survival.
The Choreography of a Lunar Landing: Key Stages
Achieving a soft landing is the paramount objective that distinguishes a lunar lander from an impactor. This delicate operation involves several precisely orchestrated stages, all executed in a vacuum where only rocket engines can provide control.
- Descent Orbit Insertion (DOI): For missions beginning in lunar orbit, this maneuver involves firing the lander’s engine to shift from a stable parking orbit into a lower, elliptical orbit where the perilune (closest point to the Moon) is very close to the surface, positioning the spacecraft for its final descent. Early landing missions like Luna 9, which flew on direct impact trajectories, did not perform this specific orbital stage.
- Powered Descent and Braking: This is the most critical phase. The lander fires its main descent engine(s) to continuously reduce its horizontal and vertical velocity. The spacecraft transitions from an orbital trajectory to a powered vertical descent as it approaches the landing site. This requires precise navigation and control to manage altitude, speed, and fuel consumption.
- Final Approach and Hazard Avoidance: As the lander nears the surface, it orients itself vertically. Advanced sensors like radar, LIDAR, and optical cameras scan the terrain below to identify the designated landing zone and detect hazards such as craters, boulders, or steep slopes. For Apollo missions, commanders could manually pilot the LM during this phase to select a safe spot. Modern robotic landers increasingly rely on autonomous hazard detection and avoidance systems.
- Touchdown: The final moments involve reducing the descent rate to a mere crawl. Typically, the main engine is shut down a few meters or even just a few feet above the lunar surface. This is done to prevent the engine’s exhaust from blasting lunar regolith (dust and small rocks) back onto the spacecraft, which could damage sensitive components, and to avoid creating a deep crater. The lander then free-falls the short remaining distance. The landing gear, often equipped with crushable elements or shock absorbers, absorbs the impact energy to ensure a gentle touchdown. The first soft landing, Luna 9, famously used an airbag system: after decelerating, it ejected a spherical payload that bounced to a stop on the surface. Luna 13 used a similar method. However, most landers, including the Surveyor probes, Apollo LMs, and modern landers like Chang’e and Odysseus, have used landing legs. Surveyor 1, for example, cut its engine at 3.4 meters and dropped, relying on crushable footpads. The Apollo LMs had 170 cm (67-inch) contact probes extending below their footpads; when one of these touched the surface, it signaled the crew to shut down the engine, though some commanders, like Neil Armstrong on Apollo 11, continued firing the engine until the lander was firmly on the ground for an exceptionally gentle landing. Later Apollo crews often shut down earlier, experiencing more noticeable bumps and greater compression of the landing struts.
The Next Generation: Proposed Lunar Landers and Research Craft
The renewed global interest in the Moon has spurred the development of a new generation of lunar landers, ranging from robotic explorers to ambitious crewed vehicles, alongside innovative research craft designed to test landing technologies on Earth.
Robotic Trailblazers (Uncrewed)
Numerous uncrewed landers are in various stages of planning and development globally. The European Space Agency (ESA) is developing the Argonaut lander (formerly European Large Logistics Lander – EL3), envisioned as a versatile system for delivering cargo and potentially supporting human missions. Russia’s Luna-Glob program aims to continue with missions like Luna 27 (Luna-Resurs 1), a polar lander, and Luna 28 (Luna-Resurs 2), which plans a polar sample return. Commercial entities are also prominent: Blue Origin is developing its Blue Moon Mark 1 cargo lander. Several landers were proposed under NASA’s earlier Lunar CATALYST program and are eligible for CLPS contracts, including the Griffin Lander from Astrobotic Technology (which will carry NASA’s VIPER rover) and concepts like the XL-1 from Masten Space Systems (company now part of Astrobotic) and MX-1 from Moon Express. India’s ISRO is planning Chandrayaan-4 for a sample return mission and the LUPEX (Lunar Polar Exploration Mission) lander in collaboration with JAXA.
Returning Humans to the Moon (Crewed)
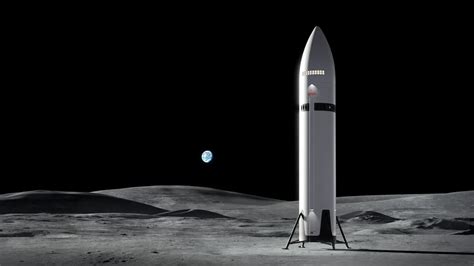
The most high-profile crewed lunar lander development is under NASA’s Artemis program, which aims to return humans to the Moon. The Human Landing System (HLS) component will provide the vehicles for astronaut descent and ascent. SpaceX’s Starship HLS, a lunar-optimized variant of its Starship super-heavy launch vehicle, was selected as the first HLS provider to land astronauts on the Artemis III mission. Subsequently, a team led by Blue Origin, with its Blue Moon Mark 2 lander, was chosen as the second HLS provider to ensure redundancy and competition for later Artemis missions. Other initial HLS contenders included the Integrated Lander Vehicle (a Dynetics-led proposal) and concepts from Lockheed Martin and Boeing. China is also advancing its crewed lunar ambitions, having introduced a staged-descent concept for a crewed landing attempt by 2030. This architecture involves a propulsion stage for initial deceleration, followed by a separate lander segment for the final descent and surface stay, which would also serve as the ascent vehicle.
Earth-Bound Testbeds (Research Craft)
Developing and refining Vertical Takeoff, Vertical Landing (VTVL) technologies crucial for lunar landers often involves terrestrial test vehicles. Competitions like the Lunar Lander Challenge spurred innovation in this area. NASA has also developed several research craft, including the Mighty Eagle lander and the Morpheus Lander under Project Morpheus. These low-altitude VTVL prototypes have been invaluable for testing autonomous landing and hazard avoidance systems, advanced engine technologies, and precise navigation, with lessons learned directly informing the development of new lunar landers, including those under the CLPS program.
The Enduring Quest for the Lunar Frontier
Lunar landers stand as a powerful symbol of humanity’s relentless drive to explore and understand the cosmos. From the pioneering, tentative touchdowns of the Luna and Surveyor probes to the historic footsteps enabled by the Apollo Lunar Module, and now to the increasingly sophisticated robotic missions and ambitious commercial ventures of the 21st century, these spacecraft are the indispensable tools for accessing the Moon’s surface. Each successful landing, and indeed every challenging attempt, expands our knowledge, tests the limits of our technological capabilities, and paves the way for a sustained human and robotic presence on our nearest celestial neighbor. As nations and private companies increasingly invest in lunar exploration, the development of more capable, reliable, and versatile lunar landers will continue to be a critical enabler for science, resource utilization, and the eventual establishment of a permanent foothold beyond Earth. The Moon, once a distant dream, is now, more than ever, within our reach, thanks to these incredible machines.








